|
| enum | SMU_CHANNEL { CHANNEL_A = 'a'
, CHANNEL_B = 'b'
} |
| | Used to select which channel of the SMU should be used to measure or supplied. More...
|
| |
| enum | UNIT { VOLTAGE = 0
, CURRENT = 1
, RESISTANCE = 2
, POWER = 3
} |
| | Unit which should be changed or measured. More...
|
| |
| enum | AUTOZERO { OFF
, ONCE
, AUTO
} |
| |
| enum | SRC_FUNC { DC_AMPS
, DC_VOLTS
} |
| |
| enum | SRC_OFF_MODE { OUTPUT_NORMAL
, OUTPUT_ZERO
, OUTPUT_HIGH_Z
} |
| |
| enum | SRC_SETTLING {
SMOOTH
, FAST_RANGE
, FAST_POLARITY
, DIRECT_IRANGE
,
SMOOTH_100NA
, FAST_ALL
} |
| |
| enum | SMU_DISPLAY { MEASURE_DC_AMPS
, MEASURE_DC_VOLTS
, MEASURE_OHMS
, MEASURE_WATTS
} |
| |
| enum | SMU_SENSE { LOCAL
, REMOTE
, CALIBRATION
} |
| |
| enum | SEND_METHOD { DIRECT_SEND = 0
, BUFFER_ENABLED = 1
} |
| |
|
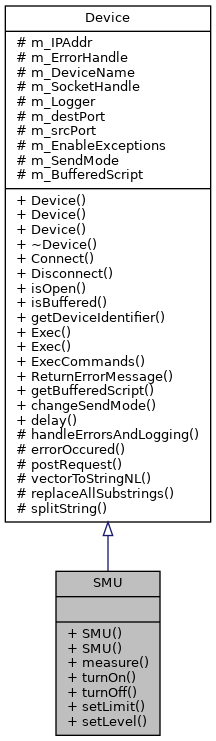
| | SMU (std::string ipAddress, int timeoutInMs, SEND_METHOD mode=DIRECT_SEND) |
| |
| | SMU (std::string ipAddress, int timeoutInMs, PIL::Logging *logger, SEND_METHOD mode=DIRECT_SEND) |
| |
| virtual PIL_ERROR_CODE | measure (UNIT unit, SMU_CHANNEL channel, double *value, bool checkErrorBuffer)=0 |
| |
| virtual PIL_ERROR_CODE | turnOn (SMU_CHANNEL channel, bool checkErrorBuffer)=0 |
| |
| virtual PIL_ERROR_CODE | turnOff (SMU_CHANNEL channel, bool checkErrorBuffer)=0 |
| |
| virtual PIL_ERROR_CODE | setLimit (UNIT unit, SMU_CHANNEL channel, double limit, bool checkErrorBuffer)=0 |
| |
| virtual PIL_ERROR_CODE | setLevel (UNIT unit, SMU_CHANNEL channel, double level, bool checkErrorBuffer)=0 |
| |
| | Device (std::string ipAddress, int timeoutInMs, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) |
| | Constructor for the Device without passing a logging object. More...
|
| |
| | Device (std::string ipAddress, int timeoutInMs, PIL::Logging *logger, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) |
| | Constructor of Device generates a socket handle without connecting to it. More...
|
| |
| | Device (std::string ipAddress, uint16_t srcPort, uint16_t destPort, int timeoutInMs, PIL::Logging *logger, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) |
| | Base class containing the base functionality of all devices. And parameters to store the name connection type, etc. More...
|
| |
| | ~Device () |
| |
| PIL_ERROR_CODE | Connect () |
| | Establish a connection to the device. More...
|
| |
| PIL_ERROR_CODE | Disconnect () |
| | Disconnect from the device. More...
|
| |
| bool | isOpen () const |
| | Checks if the connection to the device is established. More...
|
| |
| bool | isBuffered () const |
| | Checks if the commands sent to the device get buffered. More...
|
| |
| std::string | getDeviceIdentifier () |
| | Gets the name of the currently connected device. More...
|
| |
| PIL_ERROR_CODE | Exec (const std::string &command, ExecArgs *args=nullptr, char *result=nullptr, bool br=true, int size=1024) |
| | execute a (SCPI) command More...
|
| |
| PIL_ERROR_CODE | Exec (const std::string &command, ExecArgs *args, std::string *result, bool br) |
| |
| PIL_ERROR_CODE | ExecCommands (std::string &commands) |
| |
| std::string | ReturnErrorMessage () |
| |
| std::string | getBufferedScript () |
| | Transforms the current buffered script into a string and returns it. More...
|
| |
| void | changeSendMode (SEND_METHOD mode) |
| | Changes the send mode of this device, i.e. whether the commands get buffered or sent directly to the device. More...
|
| |
| PIL_ERROR_CODE | delay (double delayTime) |
| | Stops the execution for the specified amount of time in seconds. If buffering is enabled, the delay is included in the buffered script. Otherwise this thread sleeps for the given time. More...
|
| |
|
| PIL_ERROR_CODE | handleErrorsAndLogging (PIL_ERROR_CODE errorCode, bool throwException, PIL::Level logLevel, const std::string &fileName, int line, std::string formatStr,...) |
| | Handle logging messages, logs it based on the previously passed logging object. If exceptions are enabled throw an exception otherwise return the error code. More...
|
| |
| static bool | errorOccured (PIL_ERROR_CODE errorCode) |
| | Checks if a error occured given the error code. More...
|
| |
| static PIL_ERROR_CODE | postRequest (const std::string &url, std::string &payload) |
| | Sends a post request to the given url with the given payload. More...
|
| |
| static std::string | vectorToStringNL (std::vector< std::string > vector) |
| | Transforms the given vector into a string. Each vector entry will be a line in the resulting string. More...
|
| |
| static std::string | replaceAllSubstrings (std::string str, const std::string &from, const std::string &to) |
| | Replaces all substrings in the string with the given replacement string. More...
|
| |
| static std::vector< std::string > | splitString (const std::string &toSplit, const std::string &delimiter) |
| | Splits a string by the given delimiter. More...
|
| |
| std::string | m_IPAddr |
| |
| PIL_ErrorHandle | m_ErrorHandle |
| |
| std::string | m_DeviceName {} |
| |
| PIL::Socket * | m_SocketHandle |
| |
| PIL::Logging * | m_Logger |
| |
| int | m_destPort = 5025 |
| |
| int | m_srcPort = 5025 |
| |
| bool | m_EnableExceptions |
| |
| SEND_METHOD | m_SendMode |
| |
| std::vector< std::string > | m_BufferedScript |
| |
Dummy class to allow assignment to SMU class.

 Public Types inherited from Device
Public Types inherited from Device