Mixed Single Oscilloscope(Oscillator) Commend operations of a single generator are defined. KST3000 is the model of the device(keysight 3000 series). More...
#include <KST3000.h>


Public Member Functions | |
| KST3000 (const char *ip, int timeoutInMS) | |
| Constructor. More... | |
| KST3000 (const char *ip, int timeoutInMs, PIL::Logging *logger) | |
| PIL_ERROR_CODE | run () override |
| Start to run. Equivalent to press the Run/Stop button when the device is not running. More... | |
| PIL_ERROR_CODE | stop () override |
| Stop to run. Equivalent to press the Run/Stop button when the device is not stopping. More... | |
| PIL_ERROR_CODE | single () override |
| Equivalent to press the Single button. More... | |
| PIL_ERROR_CODE | autoScale () override |
| Equivalent to press the "Auto Scale" button. More... | |
| PIL_ERROR_CODE | setTimeRange (double value) override |
| Set timebase(horizontal) range; Equivalent to adjust the "Horizontal" knob. More... | |
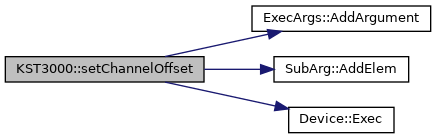
| PIL_ERROR_CODE | setChannelOffset (OSC_CHANNEL channel, double offset) override |
| Set vertical offset. Equivalent to adjust the knob below channel number button. More... | |
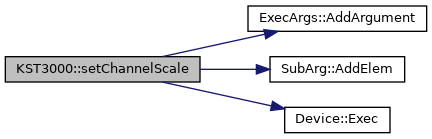
| PIL_ERROR_CODE | setChannelScale (OSC_CHANNEL channel, double value) override |
| Equivalent to adjust the knob above channel numbers. e.g. CHANnel3:SCALe 5. More... | |
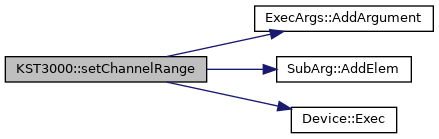
| PIL_ERROR_CODE | setChannelRange (OSC_CHANNEL channel, double value, VOLTAGE_UNIT voltageUnit) override |
| Similar to setChannelScale, but set the whole voltage range. More... | |
| PIL_ERROR_CODE | setTriggerEdge (TRIGGER_EDGE edge) override |
| Set trigger slope. More... | |
| PIL_ERROR_CODE | setTriggerSource (OSC_CHANNEL channel) override |
| Set trigger channel. More... | |
| PIL_ERROR_CODE | setTimeDelay (double delay) |
| Set timebase(horizontal) delay; Equivalent to adjust the delay knob in Horizontal controls. e.g. TIMebase:DElay 5. More... | |
| PIL_ERROR_CODE | setWaveformSource (OSC_CHANNEL channel) |
| set waveform source More... | |
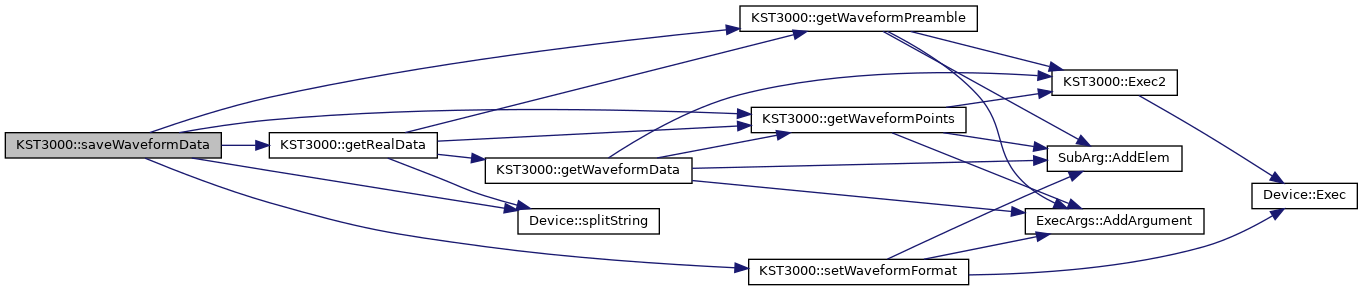
| PIL_ERROR_CODE | getWaveformPreamble (std::string *result) |
| Query the preamble of waveform data, e.g. WAVeform:PREamble? More... | |
| PIL_ERROR_CODE | getWaveformPoints (int *nrWaveFormPoints) |
| Query the number of waveform points to be transferred. More... | |
| PIL_ERROR_CODE | setWaveformPoints (int num_points) |
| set number of waveform points More... | |
| PIL_ERROR_CODE | setWaveformPointsMode (std::string &mode) |
| set waveform points mode More... | |
| PIL_ERROR_CODE | setWaveformFormat (FILE_FORMAT format) |
| set format of waveform data(default "BYTE") More... | |
| PIL_ERROR_CODE | saveWaveformData (std::string &file_path) |
| save waveform data to the target file More... | |
| PIL_ERROR_CODE | getWaveformData (std::string *data) |
| get the sampled data points More... | |
| PIL_ERROR_CODE | getRealData (double **result) |
| convert a measurement data array to a 2d array: time array & voltage array More... | |
| std::vector< std::vector< double > > | getRealDataPy () |
| convert a measurement data array to a 2d array: time array & voltage array More... | |
| PIL_ERROR_CODE | digitize (OSC_CHANNEL channel) |
| capture data More... | |
| PIL_ERROR_CODE | getSystemSetup (std::string *result) |
| get system setup More... | |
| PIL_ERROR_CODE | setDisplayMode (DISPLAY_MODES displayMode) |
| set timebase mode More... | |
| PIL_ERROR_CODE | displayConnection () |
| Display a line of text: Connected Successfully. Returning... The message will disappear after 2 seconds. Can be used to make sure the connection is working. More... | |
| PIL_ERROR_CODE | setChannelDisplay (OSC_CHANNEL channel, int on) |
| Show or hide channel display. Equivalent to press channel number button. More... | |
| PIL_ERROR_CODE | Exec2 (const std::string &command, ExecArgs *args, std::string *result, bool br) |
 Public Member Functions inherited from Oscilloscope Public Member Functions inherited from Oscilloscope | |
| Oscilloscope (const char *ip, int timeoutInMs, PIL::Logging *logger) | |
| Public Member Functions inherited from Device | |
| Device (std::string ipAddress, int timeoutInMs, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) | |
| Constructor for the Device without passing a logging object. More... | |
| Device (std::string ipAddress, int timeoutInMs, PIL::Logging *logger, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) | |
| Constructor of Device generates a socket handle without connecting to it. More... | |
| Device (std::string ipAddress, uint16_t srcPort, uint16_t destPort, int timeoutInMs, PIL::Logging *logger, SEND_METHOD mode=DIRECT_SEND, bool throwException=true) | |
| Base class containing the base functionality of all devices. And parameters to store the name connection type, etc. More... | |
| ~Device () | |
| PIL_ERROR_CODE | Connect () |
| Establish a connection to the device. More... | |
| PIL_ERROR_CODE | Disconnect () |
| Disconnect from the device. More... | |
| bool | isOpen () const |
| Checks if the connection to the device is established. More... | |
| bool | isBuffered () const |
| Checks if the commands sent to the device get buffered. More... | |
| std::string | getDeviceIdentifier () |
| Gets the name of the currently connected device. More... | |
| PIL_ERROR_CODE | Exec (const std::string &command, ExecArgs *args=nullptr, char *result=nullptr, bool br=true, int size=1024) |
| execute a (SCPI) command More... | |
| PIL_ERROR_CODE | Exec (const std::string &command, ExecArgs *args, std::string *result, bool br) |
| PIL_ERROR_CODE | ExecCommands (std::string &commands) |
| std::string | ReturnErrorMessage () |
| std::string | getBufferedScript () |
| Transforms the current buffered script into a string and returns it. More... | |
| void | changeSendMode (SEND_METHOD mode) |
| Changes the send mode of this device, i.e. whether the commands get buffered or sent directly to the device. More... | |
| PIL_ERROR_CODE | delay (double delayTime) |
| Stops the execution for the specified amount of time in seconds. If buffering is enabled, the delay is included in the buffered script. Otherwise this thread sleeps for the given time. More... | |
Additional Inherited Members | |
| Public Types inherited from Oscilloscope | |
| enum | OSC_CHANNEL { CHANNEL_1 = 0 , CHANNEL_2 = 1 , CHANNEL_3 = 2 , CHANNEL_4 = 3 } |
| enum | TRIGGER_EDGE { POS_EDGE = 0 , NEG_EDGE = 1 , EITHER = 2 , ALTERNATING = 3 } |
| enum | DISPLAY_MODES { MAIN = 0 , WIND = 1 , XY = 2 , ROLL = 3 } |
| enum | FILE_FORMAT { ASCII = 0 , WORD = 1 , BYTE = 2 } |
| enum | VOLTAGE_UNIT { VOLT , MILLI_VOLT } |
| Public Types inherited from Device | |
| enum | SEND_METHOD { DIRECT_SEND = 0 , BUFFER_ENABLED = 1 } |
| Protected Member Functions inherited from Device | |
| PIL_ERROR_CODE | handleErrorsAndLogging (PIL_ERROR_CODE errorCode, bool throwException, PIL::Level logLevel, const std::string &fileName, int line, std::string formatStr,...) |
| Handle logging messages, logs it based on the previously passed logging object. If exceptions are enabled throw an exception otherwise return the error code. More... | |
| Static Protected Member Functions inherited from Device | |
| static bool | errorOccured (PIL_ERROR_CODE errorCode) |
| Checks if a error occured given the error code. More... | |
| static PIL_ERROR_CODE | postRequest (const std::string &url, std::string &payload) |
| Sends a post request to the given url with the given payload. More... | |
| static std::string | vectorToStringNL (std::vector< std::string > vector) |
| Transforms the given vector into a string. Each vector entry will be a line in the resulting string. More... | |
| static std::string | replaceAllSubstrings (std::string str, const std::string &from, const std::string &to) |
| Replaces all substrings in the string with the given replacement string. More... | |
| static std::vector< std::string > | splitString (const std::string &toSplit, const std::string &delimiter) |
| Splits a string by the given delimiter. More... | |
| Protected Attributes inherited from Device | |
| std::string | m_IPAddr |
| PIL_ErrorHandle | m_ErrorHandle |
| std::string | m_DeviceName {} |
| PIL::Socket * | m_SocketHandle |
| PIL::Logging * | m_Logger |
| int | m_destPort = 5025 |
| int | m_srcPort = 5025 |
| bool | m_EnableExceptions |
| SEND_METHOD | m_SendMode |
| std::vector< std::string > | m_BufferedScript |
Detailed Description
Mixed Single Oscilloscope(Oscillator) Commend operations of a single generator are defined. KST3000 is the model of the device(keysight 3000 series).
Constructor & Destructor Documentation
◆ KST3000() [1/2]
|
explicit |
Constructor.
- Parameters
-
ip IP address of kst3000
- Note
- Get oscillator's m_IPAddr: Press "Utility" key; Press I/O;
◆ KST3000() [2/2]
| KST3000::KST3000 | ( | const char * | ip, |
| int | timeoutInMs, | ||
| PIL::Logging * | logger | ||
| ) |
Member Function Documentation
◆ autoScale()
|
overridevirtual |
Equivalent to press the "Auto Scale" button.
Implements Oscilloscope.

◆ digitize()
| PIL_ERROR_CODE KST3000::digitize | ( | OSC_CHANNEL | channel | ) |
capture data

◆ displayConnection()
| PIL_ERROR_CODE KST3000::displayConnection | ( | ) |
Display a line of text: Connected Successfully. Returning... The message will disappear after 2 seconds. Can be used to make sure the connection is working.
◆ Exec2()
| PIL_ERROR_CODE KST3000::Exec2 | ( | const std::string & | command, |
| ExecArgs * | args, | ||
| std::string * | result, | ||
| bool | br | ||
| ) |


◆ getRealData()
| PIL_ERROR_CODE KST3000::getRealData | ( | double ** | result | ) |
convert a measurement data array to a 2d array: time array & voltage array


◆ getRealDataPy()
| std::vector< std::vector< double > > KST3000::getRealDataPy | ( | ) |
convert a measurement data array to a 2d array: time array & voltage array

◆ getSystemSetup()
| PIL_ERROR_CODE KST3000::getSystemSetup | ( | std::string * | result | ) |
get system setup
◆ getWaveformData()
| PIL_ERROR_CODE KST3000::getWaveformData | ( | std::string * | data | ) |
get the sampled data points
READ_WAVE_DATA - The wave data consists of two parts: the header, and the actual waveform data followed by a new line (NL) character.
The query data has the following format:
<header><waveform_data><NL>
Where:
<header> = #800001000 (This is an example header)
The "#8" may be stripped off of the header and the remaining numbers are the size, in bytes, of the waveform data block. The size can vary depending on the number of points acquired for the waveform.(In the example, 1000 points) You can then read that number of bytes from the oscilloscope and the terminating NL character.


◆ getWaveformPoints()
| PIL_ERROR_CODE KST3000::getWaveformPoints | ( | int * | nrWaveformPoints | ) |
Query the number of waveform points to be transferred.
- Returns
- the number of waveform points to be transferred

◆ getWaveformPreamble()
| PIL_ERROR_CODE KST3000::getWaveformPreamble | ( | std::string * | result | ) |
Query the preamble of waveform data, e.g. WAVeform:PREamble?
- Returns
- a array containing preamble [Waveform format, Acquire type, Waveform points desired, Waveform average count, Waveform X increment, Waveform X origin, Waveform X reference, Waveform Y increment, Waveform Y origin, Waveform Y reference]

◆ run()
|
overridevirtual |
Start to run. Equivalent to press the Run/Stop button when the device is not running.
Implements Oscilloscope.

◆ saveWaveformData()
| PIL_ERROR_CODE KST3000::saveWaveformData | ( | std::string & | file_path | ) |
save waveform data to the target file
The file can be plotted, for example using python.
◆ setChannelDisplay()
| PIL_ERROR_CODE KST3000::setChannelDisplay | ( | OSC_CHANNEL | channel, |
| int | on | ||
| ) |
Show or hide channel display. Equivalent to press channel number button.
- Parameters
-
on 1 or 0. 1: show channel single. 0: hide channel single. channel channel number, default 1

◆ setChannelOffset()
|
overridevirtual |
Set vertical offset. Equivalent to adjust the knob below channel number button.
- Parameters
-
offset vertical offset, unit: V channel channel number, default 1
Implements Oscilloscope.
◆ setChannelRange()
|
overridevirtual |
Similar to setChannelScale, but set the whole voltage range.
- Parameters
-
range voltage range(vertical) target channel: default 1 is_v voltage unit: - true: use V as unit, default
- false: use mV as unit
Implements Oscilloscope.
◆ setChannelScale()
|
overridevirtual |
Equivalent to adjust the knob above channel numbers. e.g. CHANnel3:SCALe 5.
- Parameters
-
scale units(voltage) per division(grid) channel target channel: default 1
Implements Oscilloscope.
◆ setDisplayMode()
| PIL_ERROR_CODE KST3000::setDisplayMode | ( | DISPLAY_MODES | mode | ) |
set timebase mode
- Parameters
-
mode {MAIN | WIND | XY | ROLL} must be MAIN before executing digitize
◆ setTimeDelay()
| PIL_ERROR_CODE KST3000::setTimeDelay | ( | double | delay | ) |
Set timebase(horizontal) delay; Equivalent to adjust the delay knob in Horizontal controls. e.g. TIMebase:DElay 5.
- Parameters
-
delay time delay, unit seconds
◆ setTimeRange()
|
overridevirtual |
Set timebase(horizontal) range; Equivalent to adjust the "Horizontal" knob.
- Parameters
-
range time range to set, unit: second
Implements Oscilloscope.
◆ setTriggerEdge()
|
overridevirtual |
Set trigger slope.
- Parameters
-
edge {POS | NEG | EITH | ALT} (Rising | Falling | Either | Alternating)
Implements Oscilloscope.
◆ setTriggerSource()
|
overridevirtual |
Set trigger channel.
- Parameters
-
channel {1(default) | 2 | 3 | 4}
Implements Oscilloscope.
◆ setWaveformFormat()
| PIL_ERROR_CODE KST3000::setWaveformFormat | ( | FILE_FORMAT | format | ) |
set format of waveform data(default "BYTE")

◆ setWaveformPoints()
| PIL_ERROR_CODE KST3000::setWaveformPoints | ( | int | num_points | ) |
set number of waveform points
◆ setWaveformPointsMode()
| PIL_ERROR_CODE KST3000::setWaveformPointsMode | ( | std::string & | mode | ) |
set waveform points mode
- Parameters
-
mode - NORMal
- MAXimum
- RAW
◆ setWaveformSource()
| PIL_ERROR_CODE KST3000::setWaveformSource | ( | OSC_CHANNEL | channel | ) |
set waveform source

◆ single()
|
overridevirtual |
Equivalent to press the Single button.
Implements Oscilloscope.

◆ stop()
|
overridevirtual |
Stop to run. Equivalent to press the Run/Stop button when the device is not stopping.
Implements Oscilloscope.

The documentation for this class was generated from the following files:
- /home/runner/work/instrument_control_lib/instrument_control_lib/include/devices/KST3000.h
- /home/runner/work/instrument_control_lib/instrument_control_lib/src/devices/KST3000.cpp